
Raconte-moi ta thèse #6 I Des robots d’accompagnement à l’accompagnement des robots : une socio-ethnographie de la « robotique sociale » en France par Martin Chevallier

Martin Chevallier est doctorant au Centre d’études des mouvements sociaux (EHESS/CNRS/INSERM), sous la direction du sociologue Claude Rosental. Il s’intéresse, dans une perspective socio-historique et ethnographique, au développement de robots destinés à vivre au plus près des humains.
« Les robots arrivent », « vont-ils envahir nos foyers ? », « On n’arrête plus les robots »… Pas un jour ne passe ou presque sans qu’un article de presse, un reportage télévisé ou un essai annonce, avec inquiétude ou enthousiasme, la banalisation de robots spécialisés ou à tout faire « dans nos vies », autrement dit, dans des espaces sociaux aussi divers que les écoles, les hôpitaux, les maisons de retraite, ou encore l’espace domestique. Cette promesse d’une « robolution » imminente, je lui ai consacré un mémoire de recherche, pour définir ses contours, cerner l’identité des acteurs, individuels et collectifs, qui la portent, et voir comment elle se concrétise en participant à un hackathon (concours de programmation) en mars 2018. Dans le droit fil de ce mémoire, j’ai poursuivi mon travail de sociologie en thèse sur les usages concrets de ces « robots », dits « sociaux », « émotionnels » ou encore « compagnons », conçus pour divertir, renseigner, mais surtout aider leur(s) utilisateur(s) humain(s). Après bien des tentatives infructueuses, j’ai fini par identifier deux terrains prometteurs : un magasin de luxe au coeur de Paris – avec un public très hétéroclite, d’étudiants en marketing, de cadres du secteur du luxe, de familles avec enfants en bas âge, de clients étrangers, à la rencontre d’un robot qui promouvait une cuvée spéciale de champagne dans le cadre d’une expérimentation de deux mois ; d’autre part, un EHPAD en banlieue parisienne qui projetait d’acquérir un robot humanoïde « assistant médical ».

Le robot Spoony, testé durant deux mois dans le cadre de l’événement « Geek mais chic » au Bon Marché (photo personnelle).
Le premier terrain, en milieu ouvert, m’a permis d’établir deux constats cruciaux pour la suite de mon enquête. Tout d’abord, pour qu’un public a priori en pleine possession de ses moyens – physiques et cognitifs – puisse interagir avec succès, voire interagir tout court, avec le robot, tout un « travail de l’usager » est nécessaire pour s’adapter à la maladresse sociale et fonctionnelle du robot : répéter, reformuler, se repositionner dans l’espace pour pallier les limites en matière de reconnaissance vocale et faciale, et de prise en compte du contexte de l’interaction ; ensuite, ce travail est secondé, facilité, voire suppléé par l’intervention de tiers, en particulier une hôtesse qui présentait le robot aux passants et les invitait à l’utiliser, avant, dans bien des cas, de les aider, plus ou moins subrepticement, à l’utiliser : elle répondait également à leurs questions sur le robot ou son fabricant, à leurs commentaires/apartés durant l’interaction, ou répondait avec connivence au sourire des clients durant leur échange avec le robot.
Alors que je préparais ma venue dans l’EHPAD qui constituait mon second terrain d’enquête, et attendais, un peu fébrilement, le feu vert de sa directrice, j’ai saisi l’occasion d’une présentation en colloque pour faire un pas de côté historique. Deux questions m’obsédaient en effet depuis l’achèvement du mémoire : 1) quand exactement a-t-on commencé, en France (et ailleurs), à travailler sur des robots destinés à « vivre » avec des personnes et à les assister dans leur quotidien ? 2) comment se fait-il que la plupart des « robots » promus à l’origine pour un usage grand public (familial/domestique) sont convertis en robots d’assistance aux personnes « vulnérables », « en perte d’autonomie », etc. ? De manière tout à fait inattendue, en remontant le fil d’une référence bibliographique, j’ai exhumé tout un pan de recherches et d’expérimentations en « robotique réhabilitative » initiées dans les années 1970. Il s’agit de robots, prenant essentiellement la forme de « stations de travail », destinés à l’assistance quotidienne de personnes lourdement handicapées (tétraplégiques, notamment). J’ai progressivement découvert qu’une transition de ce public vers celui des personnes âgées dépendantes s’était effectué dès le début des années 90, et qu’à partir de là, l’attention s’était progressivement décalée de l’assistance physique (tâches de manipulation) vers l’assistance cognitive (rappel de rdv, de prise de médicaments, divertissement, télé-assistance, etc.). Contrairement à ce qu’on lit et entend un peu partout, non, la robotique n’est certainement pas une science « émergente », et l’accompagnement d’un public fragile par des robots d’assistance est loin d’être une nouveauté. Malgré tous les progrès réalisés en matière de machine learning, de miniaturisation des composants, de mécatronique, la « vie avec les robots » se traduit, hier comme aujourd’hui, par des expérimentations brèves, rarement pérennisées. Enfin, cette histoire longue de la robotique d’accompagnement a confirmé l’importance des médiateurs de l’interaction entre le robot et son utilisateur « final », en l’espèce, celle des ergothérapeutes.
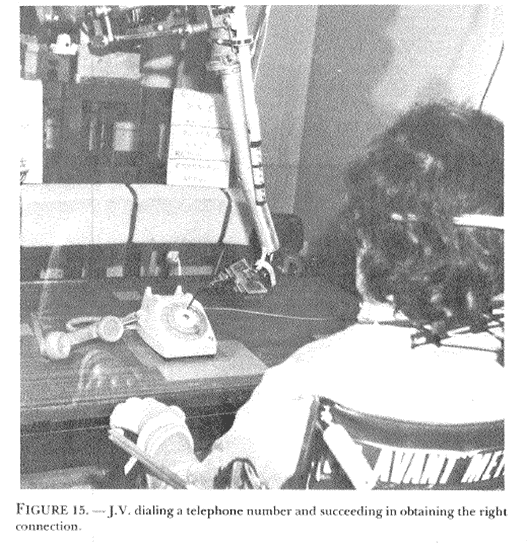
Un tétraplégique composant un numéro de téléphone sur le combiné par l’intermédiaire du robot SPARTACUS (tiré de Guittet et al., 1979)
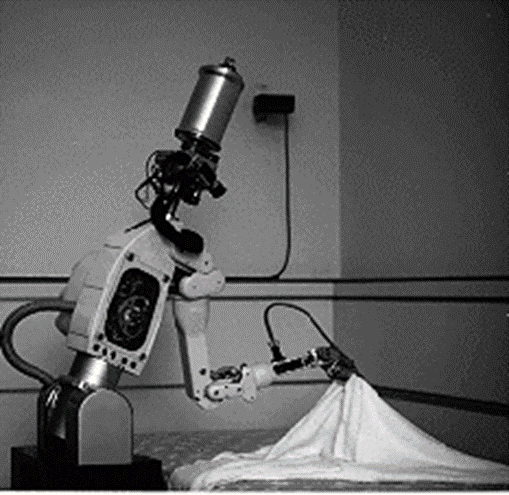
Le robot mobile MOVAID retirant le drap d’un lit (tiré de Dario et al., 1999)
À l’issue du terrain en EHPAD, l’importance de ce travail de facilitation des soignants m’a finalement amené à remettre en cause de manière plus fondamentale la notion d’« interaction », que tout un pan de la littérature – les Human-Robot Interaction studies – aborde comme une entité discrète, facilement observable, et constituée par un binôme robot-humain. En dialogue avec mon directeur de recherche, j’ai ainsi privilégié la notion de « mise en rapport », pour souligner le caractère situé, construit, et lourdement encadré de la rencontre entre un robot et son utilisateur. De manière totalement imprévue, le robot « assistant médical » n’a finalement pas été acheté, et l’une des raisons de ce revirement était justement la crainte d’un trop fort besoin d’accompagnement du robot par l’équipe soignante, pour emmener les résidents jusqu’à lui, les aider à manipuler le tensiomètre, ou encore répéter les consignes du robot pour pallier une déficience auditive, etc. ; le projet a laissé place au test puis à l’achat d’un robot phoque « émotionnel interactif », crédité de nombreux bénéfices thérapeutiques (baisse de l’anxiété, recréation de lien social, support de réminiscences...) ; dans les faits, son utilisation reposait sur un intense travail d'accompagnement tactile et verbal, pour éveiller l’intérêt de résidents souvent apathiques et confus, faire durer l’échange avec le robot, voire la rendre possible.

Un soignant (ASH, agent des services hospitaliers) présente le robot PARO à une résidente en Unité de Vie Protégée. En l’occurrence, le soignant a dû se
plier aux préférences tactiles de la résidente, qui n’a voulu le caresser qu’à condition qu’il ne soit pas posé sur son giron, mais tenu légèrement en retrait
par le soignant (photo personnelle).
Commentaires0
Vous n'avez pas les droits pour lire ou ajouter un commentaire.
Articles suggérés